miércoles, 9 de noviembre de 2016




viernes, 27 de mayo de 2016

lunes, 23 de mayo de 2016
Tipus de xarxes
· En les xarxes cablejades hi ha un medi físic que comunica els diversos components entre ells: coure o fibre òptica, normalment.

· En les xarxes sense fil la comunicació entre equips es du a terme mitjançant ones de ràdio o microones.

· En les zones mixtes hi ha equips connectats amb cable i equips connectats sense fil.

· En les xarxes sense fil la comunicació entre equips es du a terme mitjançant ones de ràdio o microones.
· En les zones mixtes hi ha equips connectats amb cable i equips connectats sense fil.
viernes, 20 de mayo de 2016
ACTIVIDADES
1. ¿ Qué es un router?¿ Cómo se connecta?
Un router—también conocido como enrutador o encaminador de paquetes— es un dispositivo que proporciona conectividad a nivel de red o nivel tres en el modelo OSI.


Un router—también conocido como enrutador o encaminador de paquetes— es un dispositivo que proporciona conectividad a nivel de red o nivel tres en el modelo OSI.
El motivo de este documento es explicar cómo hay que conectar y configurar un router ADSL (por ej. un antiguo 3com 812 que no tiene posibilidad de ser inalámbrico) y un router ADSL+WIFI como un 3com 11g (por ej: un 3CRADSL72) para conectar a internet mediante el router ADSL y que los equipos con wifi puedan usar el ADSL+WIFI como punto de acceso para conectar con varias máquinas a Internet con una única conexión ADSL.
Aunque en el documento se haga alusión a routers ADSL, el método es igualmente válido para cablerouters, routers para FTTH o cualquier combinación de ellos.
2. Test de velocidad.
Es un método que se utiliza para medir la connexión que tenemos de Internet en nuestro dispositivo.

3. Ventajas e inconvenientes de una connexión Wi-Fi y una cableada.
Una de las dudas que nos pueden surgir a la hora de montar una red es el tipo que más nos conviene. Por un lado tenemos la tradicional red cableada (Ethernet) y por otro la red Wireless (sin cables), en este caso bajo los protocolos Wifi 802.11b/g o n.
En este tutorial tratamos de despejar algunas dudas que puedas tener al respecto.viernes, 6 de mayo de 2016
Internet
Què és una xarxa informàtica?
És una agrupació d'ordinadors o altres dispositius connectats entre ells i que es poden intercanviar dades de tot tipus.
Què és internet?
És una agrupació de xarxes informàtiques distribuïdes per tot el món i connectades entre elles.

Principals sistemes de connexió a internet
· Els televisors connectats a Internet permeten accedir a programes, sèries, etc.

· Les videoconsoles permeten jugar amb usuaris de qualsevol part del món.

· Els reproductors MP3 permeten escoltar música i comprar-la directament des del mateix dispositiu.

· Els receptors GPS obtenen informació sobre obres en la calçada, l'estat del trànsit o inclemències meteorològiques.

És una agrupació d'ordinadors o altres dispositius connectats entre ells i que es poden intercanviar dades de tot tipus.
Què és internet?
És una agrupació de xarxes informàtiques distribuïdes per tot el món i connectades entre elles.
Principals sistemes de connexió a internet
· Els televisors connectats a Internet permeten accedir a programes, sèries, etc.
· Les videoconsoles permeten jugar amb usuaris de qualsevol part del món.
· Els reproductors MP3 permeten escoltar música i comprar-la directament des del mateix dispositiu.
· Els receptors GPS obtenen informació sobre obres en la calçada, l'estat del trànsit o inclemències meteorològiques.
lunes, 2 de mayo de 2016
ACTIVITATS
1. ¿Cómo funciona un GPS?
3. Cómo localizar a familiares y amigos en los mapas de Google.

Paso 1: La Triangulación desde los satélites
Aunque pueda parecer improbable, la idea general detrás del
GPS es utilizar los satélites en el espacio como puntos de referencia para
ubicaciones aquí en la tierra.
Esto se logra mediante una muy, pero muy exacta, medición de
nuestra distancia hacia al menos tres satélites, lo que nos permite
"triangular" nuestra posición en cualquier parte de la tierra.
Olvidémonos por un instante sobre cómo mide nuestro GPS
dicha distancia. Lo veremos luego. Consideremos primero como la medición de
esas distancias nos permiten ubicarnos en cualquier punto de la tierra.
La gran idea, Geométricamente, es:
Supongamos que medimos nuestra distancia al primer satélite
y resulta ser de 11.000 millas (20.000 Km)
Sabiendo que estamos a 11.000 millas de un satélite
determinado, no podemos por lo tanto estar en cualquier punto del universo sino
que esto limita nuestra posición a la superficie de una esfera que tiene como
centro dicho satélite y cuyo radio es de 11.000 millas.
A continuación medimos nuestra distancia a un segundo
satélite y descubrimos que estamos a 12.000 millas del mismo.
Esto nos dice que no estamos solamente en la primer esfera,
correspondiente al primer satélite, sino también sobre otra esfera que se
encuentra a 12.000 millas del segundo satélite. En otras palabras, estamos en
algún lugar de la circunferencia que resulta de la intersección de las dos
esferas.
Si ahora medimos nuestra distancia a un tercer satélite y
descubrimos que estamos a 13.000 millas del mismo, esto limita nuestra posición
aún mas, a los dos puntos en los cuales la esfera de 13.000 millas corta la
circunferencia que resulta de la intersección de las dos primeras esferas.
O sea, que midiendo nuestra distancia a tres satélites
limitamos nuestro posicionamiento a solo dos puntos posibles.
Para decidir cual de ellos es nuestra posición verdadera, podríamos
efectuar una nueva medición a un cuarto satélite. Pero normalmente uno de los
dos puntos posibles resulta ser muy improbable por su ubicación demasiado
lejana de la superficie terrestre y puede ser descartado sin necesidad de
mediciones posteriores.
Una cuarta medición, de todos modos es muy conveniente por
otra razón que veremos mas adelante.
Veamos ahora como el sistema mide las distancias a los
satélites.
En Resumen: Triangulación
Nuestra posición se calcula en base a la medición de las
distancias a los satélites
Matemáticamente se necesitan cuatro mediciones de distancia
a los satélites para determinar la posición exacta
En la práctica se resuelve nuestra posición con solo tres
mediciones si podemos descartar respuestas ridículas o utilizamos ciertos
trucos.
Se requiere de todos modos una cuarta medición por razones
técnicas que luego veremos.
Paso 2: Midiendo las distancias a los satélites
Sabemos ahora que nuestra posición se calcula a partir de la
medición de la distancia hasta por lo menos tres satélites. Pero, ¿cómo podemos
medir la distancia hacia algo que está flotando en algún lugar en el espacio?.
Lo hacemos midiendo el tiempo que tarda una señal emitida por el satélite en
llegar hasta nuestro receptor de GPS.
La gran idea, Matemáticamente, es:
Toda la idea bulle alrededor de aquellos problemas sobre la
velocidad que resolvíamos en la secundaria, Recordemos que "Si un auto
viaja a 60 kilómetros por hora durante dos horas, ¿qué distancia recorrió?
Velocidad (60 km/h) x Tiempo (2 horas) = Distancia (120 km)
En el caso del GPS estamos midiendo una señal de radio, que
sabemos que viaja a la velocidad de la luz, alrededor de 300.000 km por
segundo.
Nos queda el problema de medir el tiempo de viaje de la
señal (Que, obviamente, viene muy rápido)
Sincronicemos nuestros relojes
El problema de la medición de ese tiempo es complicado. Los
tiempos son extremadamente cortos. Si el satélite estuviera justo sobre
nuestras cabezas, a unos 20.000 km de altura, el tiempo total de viaje de la
señal hacia nosotros sería de algo mas de 0.06 segundos. Estamos necesitando
relojes muy precisos. Ya veremos como lo resolvemos.
Pero, aún admitiendo que tenemos relojes con la suficiente
precisión, ¿cómo medimos el tiempo de viaje de la señal?
Supongamos que nuestro GPS, por un lado, y el satélite, por
otro, generan una señal auditiva en el mismo instante exacto. Supongamos
también que nosotros, parados al lado de nuestro receptor de GPS, podamos oír
ambas señales (Obviamente es imposible "oír" esas señales porque el
sonido no se propaga en el vacío).
Oiríamos dos versiones de la señal. Una de ellas
inmediatamente, la generada por nuestro receptor GPS y la otra con cierto
atraso, la proveniente del satélite, porque tuvo que recorrer alrededor de
20.000 km para llegar hasta nosotros. Podemos decir que ambas señales no están
sincronizadas.
Si quisiéramos saber cual es la magnitud de la demora de la
señal proveniente del satélite podemos retardar la emisión de la señal de
nuestro GPS hasta lograr la perfecta sincronización con la señal que viene del
satélite.
El tiempo de retardo necesario para sincronizar ambas
señales es igual al tiempo de viaje de la señal proveniente del satélite.
Supongamos que sea de 0.06 segundos. Conociendo este tiempo, lo multiplicamos
por la velocidad de la luz y ya obtenemos la distancia hasta el satélite.
Tiempo de retardo (0.06 seg) x Vel. de la luz (300.000
km/seg) = Dist. (18.000 km)
Así es, básicamente, como funciona el GPS.
La señal emitida por nuestro GPS y por el satélite es algo
llamado "Código Pseudo Aleatorio" (Pseudo Random Code). La palabra
"Aleatorio" significa algo generado por el azar.
¿Un Código Aleatorio?
Este Código Pseudo Aleatorio es una parte fundamental del
GPS. Físicamente solo se trata de una secuencia o código digital muy
complicado. O sea una señal que contiene una sucesión muy complicada de pulsos
"on" y "off", como se pueden ver:
La señal es tan complicada que casi parece un ruido
eléctrico generado por el azar. De allí su denominación de
"Pseudo-Aleatorio".
Hay varias y muy buenas razones para tal complejidad. La
complejidad del código ayuda a asegurarnos que el receptor de GPS no se
sintonice accidentalmente con alguna otra señal. Siendo el modelo tan complejo
es altamente improbable que una señal cualquiera pueda tener exactamente la
misma secuencia.
Dado que cada uno de los satélites tiene su propio y único
Código Pseudo Aleatorio, esta complejidad también garantiza que el receptor no
se confunda accidentalmente de satélite. De esa manera, también es posible que
todos los satélites trasmitan en la misma frecuencia sin interferirse
mutuamente. Esto también complica a cualquiera que intente interferir el
sistema desde el exterior al mismo. El Código Pseudo Aleatorio le da la
posibilidad al Departamento de Defensa de EEUU de controlar el acceso al
sistema GPS.
Pero hay otra razón para la complejidad del Código Pseudo
Aleatorio, una razón que es crucial para conseguir un sistema GPS económico.
El código permite el uso de la "teoría de la
información" para amplificar las señales de GPS. Por esa razón las débiles
señales emitidas por los satélites pueden ser captadas por los receptores de
GPS sin el uso de grandes antenas.
Cuando comenzamos a explicar el mecanismo de emisión de las
señales por el GPS y el satélite, asumimos que ambos comenzaban la emisión de
la señal exactamente al mismo tiempo. ¿Pero cómo podemos asegurarnos que todo
esté perfectamente sincronizado?
Ya veremos...
En Resumen: Midiendo la distancia
La distancia al satélite se determina midiendo el tiempo que
tarda una señal de radio, emitida por el mismo, en alcanzar nuestro receptor de
GPS.
Para efectuar dicha medición asumimos que ambos, nuestro
receptor GPS y el satélite, están generando el mismo Código Pseudo Aleatorio en
exactamente el mismo momento.
Comparando cuanto retardo existe entre la llegada del Código
Pseudo Aleatorio proveniente del satélite y la generación del código de nuestro
receptor de GPS, podemos determinar cuanto tiempo le llevó a dicha señal llegar
hasta nosotros.
Multiplicamos dicho tiempo de viaje por la velocidad de la
luz y obtenemos la distancia al satélite.
Paso 3: Control perfecto del tiempo
Si la medición del tiempo de viaje de una señal de radio es
clave para el GPS, los relojes que empleamos deben ser exactísimos, dado que si
miden con un desvío de un milésimo de segundo, a la velocidad de la luz, ello
se traduce en un error de 300 km!
Por el lado de los satélites, el timing es casi perfecto
porque llevan a bordo relojes atómicos de increíble precisión.
¿Pero que pasa con nuestros receptores GPS, aquí en la
tierra?
Recordemos que ambos, el satélite y el receptor GPS, deben
ser capaces de sincronizar sus Códigos Pseudo Aleatorios para que el sistema
funcione.
Si nuestros receptores GPS tuvieran que alojar relojes
atómicos (Cuyo costo está por encima de los 50 a 100.000 U$S) la tecnología
resultaría demasiado costosa y nadie podría acceder a ellos.
Por suerte los diseñadores del sistema GPS encontraron una
brillante solución que nos permite resolver el problema con relojes mucho menos
precisos en nuestros GPS. Esta solución es uno de los elementos clave del
sistema GPS y, como beneficio adicional, significa que cada receptor de GPS es
en esencia un reloj atómico por su precisión.
El secreto para obtener un timing tan perfecto es efectuar
una medición satelital adicional.
Resulta que si tres mediciones perfectas pueden posicionar
un punto en un espacio tridimensional, cuatro mediciones imperfectas pueden
lograr lo mismo.
Esta idea es fundamental para el funcionamiento del sistema
GPS, pero su explicación detallada excede los alcances de la presente
exposición. De todos modos, aquí va un resumen somero:
Una medición adicional remedia el desfasaje del timing.
Si todo fuera perfecto (es decir que los relojes de nuestros
receptores GPS lo fueran), entonces todos los rangos (distancias) a los
satélites se intersectarían en un único punto (que indica nuestra posición).
Pero con relojes imperfectos, una cuarta medición, efectuada como control
cruzado, NO intersectará con los tres primeros.
De esa manera la computadora de nuestro GPS detectará la
discrepancia y atribuirá la diferencia a una sincronización imperfecta con la
hora universal.
Dado que cualquier discrepancia con la hora universal
afectará a las cuatro mediciones, el receptor buscará un factor de corrección
único que siendo aplicado a sus mediciones de tiempo hará que los rangos
coincidan en un solo punto.
Dicha corrección permitirá al reloj del receptor ajustarse
nuevamente a la hora universal y de esa manera tenemos un reloj atómico en la
palma de nuestra mano!
Una vez que el receptor de GPS aplica dicha corrección al
resto de sus mediciones, obtenemos un posicionamiento preciso.
Una consecuencia de este principio es que cualquier GPS
decente debe ser capaz de sintonizar al menos cuatro satélites de manera
simultánea. En la práctica, casi todos los GPS en venta actualmente, acceden a
mas de 6, y hasta a 12, satélites simultáneamente.
Ahora bien, con el Código Pseudo Aleatorio como un pulso
confiable para asegurar la medición correcta del tiempo de la señal y la
medición adicional como elemento de sincronización con la hora universal,
tenemos todo lo necesario para medir nuestra distancia a un satélite en el
espacio.
Pero, para que la triangulación funcione necesitamos conocer
no sólo la distancia sino que debemos conocer dónde están los satélites con
toda exactitud.
Veremos cómo lo conseguimos.
En Resumen: Obtener un Timing Perfecto
Un timing muy preciso es clave para medir la distancia a los
satélites
Los satélites son exactos porque llevan un reloj atómico a
bordo.
Los relojes de los receptores GPS no necesitan ser tan
exactos porque la medición de un rango a un satélite adicional permite corregir
los errores de medición.
Paso 4: Conocer dónde están los satélites en el espacio
A lo largo de este trabajo hemos estado asumiendo que
conocemos dónde están los satélites en sus órbitas y de esa manera podemos
utilizarlos como puntos de referencia.
¿Pero, cómo podemos saber donde están exactamente? Todos
ellos están flotando a unos 20.000 km de altura en el espacio.
Un satélite a gran altura se mantiene estable
La altura de 20.000 km es en realidad un gran beneficio para
este caso, porque algo que está a esa altura está bien despejado de la
atmósfera. Eso significa que orbitará de manera regular y predecible mediante
ecuaciones matemáticas sencillas.
La Fuerza Aérea de los EEUU colocó cada satélite de GPS en
una órbita muy precisa, de acuerdo al Plan Maestro de GPS.
En tierra, todos los receptores de GPS tienen un almanaque
programado en sus computadoras que les informan donde está cada satélite en el
espacio, en cada momento.
El Control Constante agrega precisión
Las órbitas básicas son muy exactas pero con el fin de
mantenerlas así, los satélites de GPS son monitoreados de manera constante por
el Departamento de Defensa.
Monitoring Satellites
Ellos utilizan radares muy precisos para controlar
constantemente la exacta altura, posición y velocidad de cada satélite.
Los errores que ellos controlan son los llamados errores de
efemérides, o sea evolución orbital de los satélites. Estos errores se generan
por influencias gravitacionales del sol y de la luna y por la presión de la
radiación solar sobre los satélites.
Estos errores son generalmente muy sutiles pero si queremos
una gran exactitud debemos tenerlos en cuenta.
Corrigiendo el
mensaje
Una vez que el Departamento de Defensa ha medido la posición
exacta de un satélite, vuelven a enviar dicha información al propio satélite.
De esa manera el satélite incluye su nueva posición corregida en la información
que transmite a través de sus señales a los GPS.
Error Message
Esto significa que la señal que recibe un receptor de GPS no
es solamente un Código Pseudo Aleatorio con fines de timing. También contiene
un mensaje de navegación con información sobre la órbita exacta del satélite
Con un timing perfecto y la posición exacta del satélite
podríamos pensar que estamos en condiciones de efectuar cálculos perfectos de
posicionamiento. Sin embargo debemos resolver otros problemas.
En Resumen: Posicionamiento de los Satélites
Para utilizar los satélites como puntos de referencia
debemos conocer exactamente donde están en cada momento.
Los satélites de GPS se ubican a tal altura que sus órbitas
son muy predecibles.
El Departamento de Defensa controla y mide variaciones
menores en sus órbitas.
La información sobre errores es enviada a los satélites para
que estos a su vez retransmitan su posición corregida junto con sus señales de
timing.
Paso 5: Corrigiendo Errores
Hasta ahora hemos estado tratando los cálculos del sistema
GPS de manera muy abstracta, como si todo el proceso ocurriera en el vacío.
Pero en el mundo real hay muchas cosas que le pueden suceder a una señal de GPS
para transformarla en algo menos que matemáticamente perfecta.
Para aprovechar al máximo las ventajas del sistema un buen
receptor de GPS debe tener en cuenta una amplia variedad de errores posibles.
Veamos que es lo que debemos enfrentar.
Un Rudo Viaje a través de la atmósfera
En primer lugar, una de las presunciones básicas que hemos
estado usando a lo largo de este trabajo no es exactamente cierta. Hemos estado
afirmando que podemos calcular la distancia a un satélite multiplicando el
tiempo de viaje de su señal por la velocidad de la luz. Pero la velocidad de la
luz sólo es constante en el vacío.
Una señal de GPS pasa a través de partículas cargadas en su
paso por la ionosfera y luego al pasar a través de vapor de agua n la
troposfera pierde algo de velocidad, creando el mismo efecto que un error de
precisión en los relojes.
GPS Signal
Hay un par de maneras de minimizar este tipo de error. Por
un lado, podríamos predecir cual sería el error tipo de un día promedio. A esto
se lo llama modelación y nos puede ayudar pero, por supuesto, las condiciones
atmosféricas raramente se ajustan exactamente el promedio previsto.
Otra manera de manejar los errores inducidos por la
atmósfera es comparar la velocidad relativa de dos señales diferentes. Esta
medición de doble frecuencia es muy sofisticada y solo es posible en receptores
GPS muy avanzados.
Un Rudo Viaje sobre la tierra
Los problemas para la señal de GPS no terminan cuando llega
a la tierra. La señal puede rebotar varias veces debido a obstrucciones locales
antes de ser captada por nuestro receptor GPS.
Multipath Error
Este error es similar al de las señales fantasma que podemos
ver en la recepción de televisión. Los buenos receptores GPS utilizan
sofisticados sistemas de rechazo para minimizar este problema.
Problemas en el satélite
Aún siendo los satélites muy sofisticados no tienen en
cuenta minúsculos errores en el sistema.
Los relojes atómicos que utilizan son muy, pero muy,
precisos, pero no son perfectos. Pueden ocurrir minúsculas discrepancias que se
transforman en errores de medición del tiempo de viaje de las señales.
Y, aunque la posición de los satélites es controlada
permanentemente, tampoco pueden ser controlados a cada segundo. De esa manera
pequeñas variaciones de posición o de efemérides pueden ocurrir entre los
tiempos de monitoreo.
Algunos ángulos son mejores que otros
La geometría básica por si misma puede magnificar estos
errores mediante un principio denominado "Dilación Geométrica de la
Precisión", o DGDP
Suena complicado pero el principio es simple.
En la realidad suele haber mas satélites disponibles que los
que el receptor GPS necesita para fijar una posición, de manera que el receptor
toma algunos e ignora al resto.
Si el receptor toma satélites que están muy juntos en el
cielo, las circunferencias de intersección que definen la posición se cruzarán
a ángulos con muy escasa diferencia entre sí. Esto incrementa el área gris o
margen de error acerca de una posición.
Close Together
Si el receptor toma satélites que están ampliamente
separados, las circunferencias intersectan a ángulos prácticamente rectos y
ello minimiza el margen de error.
Widely Separated
Los buenos receptores son capaces de determinar cuales son
los satélites que dan el menor error por Dilución Geométrica de la Precisión.
¡Errores Intencionales!
Aunque resulte difícil de creer, el mismo Gobierno que pudo
gastar 12.000 Millones de dólares para desarrollar el sistema de navegación más
exacto del mundo, está degradando intencionalmente su exactitud. Dicha política
se denomina "Disponibilidad Selectiva" y pretende asegurar que
ninguna fuerza hostil o grupo terrorista pueda utilizar el GPS para fabricar
armas certeras.
Básicamente, el Departamento de Defensa introduce cierto
"ruido" en los datos del reloj satelital, lo que a su vez se traduce
en errores en los cálculos de posición. El Departamento de Defensa también
puede enviar datos orbitales ligeramente erróneos a los satélites que estos
reenvían a los receptores GPS como parte de la señal que emiten.
Estos errores en su conjunto son la mayor fuente unitaria de
error del sistema GPS. Los receptores de uso militar utilizan una clave
encriptada para eliminar la Disponibilidad Selectiva y son, por ello, mucho más
exactos.
La línea final
Afortunadamente todos esos errores no suman demasiado error
total. Existe una forma de GPS, denominada GPS Diferencial, que reduce
significativamente estos problemas.
2. Uso de los GPS.
El GPS (Global
Positioning System: sistema de posicionamiento global) o NAVSTAR-GPS[1] es un
sistema global de navegación por satélite (GNSS) que permite determinar en todo
el mundo la posición de un objeto, una persona o un vehículo con una precisión
hasta de centímetros (si se utiliza GPS diferencial), aunque lo habitual son
unos pocos metros de precisión. El sistema fue desarrollado, instalado y
actualmente operado por el Departamento de Defensa de los Estados Unidos.
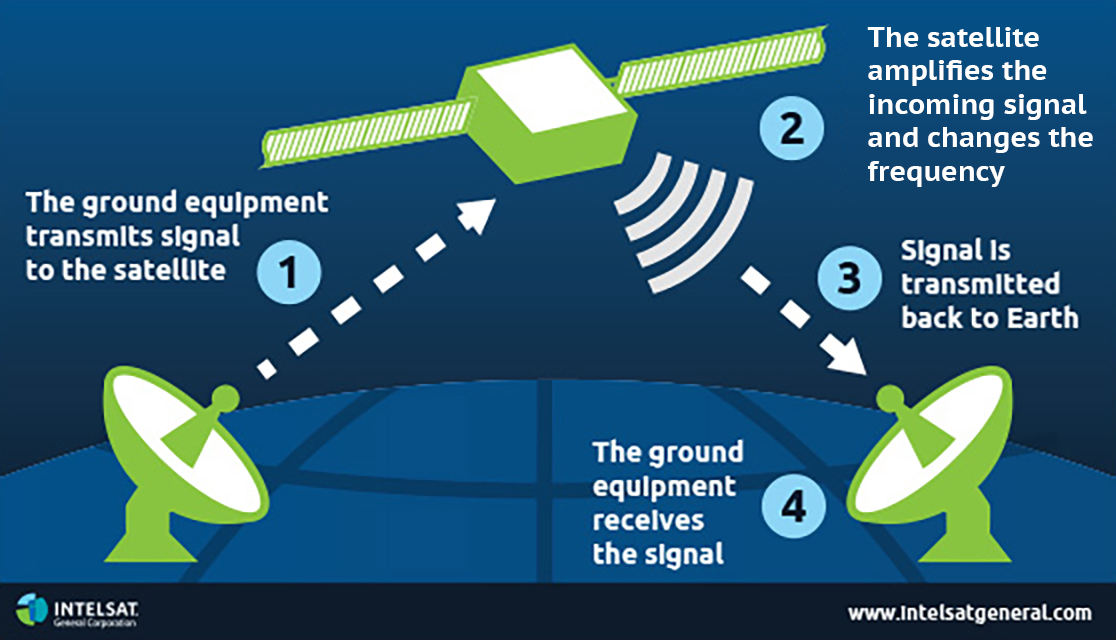
El GPS funciona mediante una red de 24 satélites en órbita sobre el globo, a 20.200 km, con trayectorias sincronizadas para cubrir toda la superficie de la Tierra. Cuando se desea determinar la posición, el receptor que se utiliza para ello localiza automáticamente como mínimo tres satélites de la red, de los que recibe unas señales indicando la identificación y la hora del reloj de cada uno de ellos. Con base en estas señales, el aparato sincroniza el reloj del GPS y calcula el tiempo que tardan en llegar las señales al equipo, y de tal modo mide la distancia al satélite mediante "triangulación" (método de trilateración inversa), la cual se basa en determinar la distancia de cada satélite respecto al punto de medición. Conocidas las distancias, se determina fácilmente la propia posición relativa respecto a los tres satélites. Conociendo además las coordenadas o posición de cada uno de ellos por la señal que emiten, se obtiene la posición absoluta o coordenadas reales del punto de medición. También se consigue una exactitud extrema en el reloj del GPS, similar a la de los relojes atómicos que llevan a bordo cada uno de los satélites.
El GPS funciona mediante una red de 24 satélites en órbita sobre el globo, a 20.200 km, con trayectorias sincronizadas para cubrir toda la superficie de la Tierra. Cuando se desea determinar la posición, el receptor que se utiliza para ello localiza automáticamente como mínimo tres satélites de la red, de los que recibe unas señales indicando la identificación y la hora del reloj de cada uno de ellos. Con base en estas señales, el aparato sincroniza el reloj del GPS y calcula el tiempo que tardan en llegar las señales al equipo, y de tal modo mide la distancia al satélite mediante "triangulación" (método de trilateración inversa), la cual se basa en determinar la distancia de cada satélite respecto al punto de medición. Conocidas las distancias, se determina fácilmente la propia posición relativa respecto a los tres satélites. Conociendo además las coordenadas o posición de cada uno de ellos por la señal que emiten, se obtiene la posición absoluta o coordenadas reales del punto de medición. También se consigue una exactitud extrema en el reloj del GPS, similar a la de los relojes atómicos que llevan a bordo cada uno de los satélites.
3. Cómo localizar a familiares y amigos en los mapas de Google.

viernes, 29 de abril de 2016
Conèixer la convergència de serveis al televisor

· Accés a videoclub en línia
· Videoconfeències a través del televisor.
· Aplicacions que es poden instal·lar en televisions intel·ligents.
· Accés a vídeos en línia.
· Agrupar les opcions disponibles per temàtiques.
· Visualització de pàgines web.
· Televisió a la carta.
· Afegir noves aplicacions, actualitzant-les, eliminant les que no ens interessen...
lunes, 25 de abril de 2016
Para iniciar sesión en Encuentra mi teléfono por primera vez
La primera vez que uses Encuentra mi teléfono, asegúrate de haber iniciado sesión en el teléfono con tu cuenta de Microsoft.
- Ve a account.microsoft.com/devices. Si se te pide que inicies sesión, usa la misma cuenta de Microsoft que usaste para iniciar sesión en el teléfono.
- Elige el teléfono que quieres buscar y, luego, haz clic en Encuentra mi teléfono.
Para encontrar tu teléfono
- Ve a account.microsoft.com/devices. Si se te pide que inicies sesión, usa la misma cuenta de Microsoft que usaste para iniciar sesión en el teléfono.
- Elige el teléfono que quieres buscar y, luego, haz clic en Encuentra mi teléfono.
- Verás un mapa con la ubicación del teléfono. Puedes acercarlo o alejarlo para verlo mejor.
Sugerencia
¿No ves la ubicación más reciente? Haz clic en Actualizar.
Para hacer sonar o bloquear el teléfono
- Ve a account.microsoft.com/devices. Si se te pide que inicies sesión, usa la misma cuenta de Microsoft que usaste para iniciar sesión en el teléfono.
- Elige el teléfono que quieres hacer sonar o bloquear y, luego, haz clic en Encuentra mi teléfono.
- Elige una de las siguientes opciones:
- Para que suene el teléfono, haz clic en Llamar y sigue las instrucciones. Sonará aunque el volumen esté desactivado o puesto en vibración.
- Para bloquear el teléfono y que se muestre un mensaje en la pantalla de bloqueo, haz clic en Bloquear y sigue las instrucciones. Si todavía no has configurado ninguna contraseña en el teléfono, tendrás que introducir una, que usarás para desbloquear el teléfono si lo recuperas.
Para borrar tu teléfono
Si sabes con seguridad que no recuperarás el teléfono o si tienes información confidencial en el teléfono que quieres proteger hasta que lo recuperes, puedes borrar el contenido del teléfono de forma remota.
- Ve a account.microsoft.com/devices. Si se te pide que inicies sesión, usa la misma cuenta de Microsoft que usaste para iniciar sesión en el teléfono.
- Elige el teléfono que quieres borrar y, luego, haz clic en Encuentra mi teléfono.
- Haz clic en Borrar.
- Si estás total y completamente seguro, selecciona la casilla Estoy listo para borrar mi teléfono y, luego, haz clic en Borrar.
Nota
Es recomendable que comuniques a tu operador de telefonía móvil que has perdido el teléfono. Si tienes tarjetas de crédito en el teléfono que perdiste, ponte en contacto con tu banco para informarles de que están perdidas.
Para cambiar la configuración de Encuentra mi teléfono
Configura Encuentra mi teléfono para que guarde tu ubicación cada pocas horas y localizar tu teléfono más fácilmente, o para que use notificaciones de inserción en vez de mensajes de texto para enviar comandos (y aplicaciones) al teléfono de forma más rápida y sin costos. Tienes que cambiar esta configuración en el teléfono y no en tu PC.
- Activa una de las siguientes casillas:
- Usar siempre notificaciones de inserción (no SMS) para enviar comandos y aplicaciones al teléfono. El servicio de Encuentra mi teléfono y la Tienda de Windows Phone de la Web usan mensajes de texto para enviar comandos y aplicaciones al teléfono. Marca esta opción para usar notificaciones de inserción en vez de mensajes de texto. ¿Por qué? Las notificaciones de inserción pueden ser más rápidas que los mensajes de texto. Además, si tu operador de telefonía móvil te cobra por cada mensaje de texto recibido, también pueden resultar más baratas. Por otra parte, Encuentra mi teléfono solo puede enviar 15 mensajes de texto a tu teléfono en un período de tres días. Con las notificaciones de inserción no existe límite.
- Guardar la ubicación de mi teléfono periódicamente y antes de que se acabe la batería. Encuentra mi teléfono puede guardar detalles de la ubicación de tu teléfono cada pocas horas por lo que, si el teléfono está fuera de cobertura o la batería se agota, podrá mostrarse en un mapa la última ubicación conocida del teléfono.
Protección frente a restablecimiento
Algunos de los dispositivos Windows Phone más recientes pueden usar Protección frente a restablecimiento, que es un servicio gratuito de account.microsoft.com que ofrece un nivel adicional de protección para que, si el teléfono acaba en las manos incorrectas, no se pueda restablecer ni reutilizar fácilmente. Consulta Protección del teléfono para obtener más información.
Televisió
La televisió és un mitjà de comunicació que transmet sons i imatges en moviment.

Tipus de transmissions
· Transmissió convencional

· Transmissió per cable

· Transmissions via satèl·lit
Tipus de transmissions
· Transmissió convencional
· Transmissió per cable
· Transmissions via satèl·lit
viernes, 22 de abril de 2016
Activitats
1. Dibuixa un motor de gasolina i indica'n les parts.

2. Què vol dir que un motor de gasolina és un motor de quatre temps? Digues com s'anomena cada temps.
3. Explica com funciona un motor de gasolina. ajuda't de dibuixos dels cuatre temps per fer-ho.

4. Quins vehicles acostumen a portar motors de gasolina?
Vehícles urbans.
5. Qui va inventar el motor de gasolina? Quin any?
Nicolaus Otto. L'any 1876.
6. Quins avantatges i inconvenients té el motor de gasolina respecte d'altres motors com el dièsel?
Se denomina bujia, al componente encargado de suministrar la chispa de encendido dentro de la camara de combustion, en un motor de combustion interna.
8. Què és l'ordre d'encesa? Posa'n un exemple.

9. Què és un motor de cilindres en línia? Dibuixa les configuracions de motors més usuals.

10. Què és la gasolina i d'on s'obté? Quins perills té?
La gasolina es una mezcla de hidrocarburos alifotermos obtenida del petróleo por destilación fraccionada, que se utiliza como combustible en motores de combustión interna con encendido por chispa convencional o por compresión (DiesOtto), así como en estufas, lámparas, limpieza con solventes y otras aplicaciones. En Argentina, Paraguay y Uruguay, la gasolina se conoce como «nafta» (del árabe «naft»), y en Chile, como «bencina».

12. Quins vehicles, en general, fan servir gasolina sense plom 95 i quins gasolina sense plom 98?
Els utilitzen molts cotxes de avui dia, però n'hi han més de gasolina.
2. Què vol dir que un motor de gasolina és un motor de quatre temps? Digues com s'anomena cada temps.
Primer tiempo
Admisión.- Al inicio de este tiempo el pistón se encuentra en el PMS (Punto Muerto Superior). En este momento la válvula de admisión se encuentra abierta y el pistón, en su carrera o movimiento hacia abajo va creando un vacío dentro de la cámara de combustión a medida que alcanza el PMI (Punto Muerto Inferior), ya sea ayudado por el motor de arranque cuando ponemos en marcha el motor, o debido al propio movimiento que por inercia le proporciona el volante una vez que ya se encuentra funcionando. El vacío que crea el pistón en este tide escape.empo, provoca que la mezcla aire-combustible que envía el carburador al múltiple de admisión penetre en la cámara de combustión del cilindro a través de la válvula de admisión abierta.
Segundo tiempo
Compresión.- Una vez que el pistón alcanza el PMI (Punto Muerto Inferior), el árbol de leva, que gira sincrónicamente con el cigüeñal y que ha mantenido abierta hasta este momento la válvula de admisión para permitir que la mezcla aire-combustible penetre en el cilindro, la cierra. En ese preciso momento el pistón comienza a subir comprimiendo la mezcla de aire y gasolina que se encuentra dentro del cilindro.
Tercer tiempo
Explosión.- Una vez que el cilindro alcanza el PMS (Punto Muerto Superior) y la mezcla aire-combustible ha alcanzado el máximo de compresión, salta una chispa eléctrica en el electrodo de la bujía, que inflama dicha mezcla y hace que explote. La fuerza de la explosión obliga al pistón a bajar bruscamente y ese movimiento rectilíneo se transmite por medio de la biela al cigüeñal, donde se convierte en movimiento giratorio y trabajo útil.
Cuarto tiempo
Escape.- El pistón, que se encuentra ahora de nuevo en el PMI después de ocurrido el tiempo de explosión, comienza a subir. El árbol de leva, que se mantiene girando sincrónicamente con el cigüeñal abre en ese momento la válvula de escape y los gases acumulados dentro del cilindro, producidos por la explosión, son arrastrados por el movimiento hacia arriba del pistón, atraviesan la válvula de escape y salen hacia la atmósfera por un tubo conectado al múltiple.
3. Explica com funciona un motor de gasolina. ajuda't de dibuixos dels cuatre temps per fer-ho.
4. Quins vehicles acostumen a portar motors de gasolina?
Vehícles urbans.
5. Qui va inventar el motor de gasolina? Quin any?
Nicolaus Otto. L'any 1876.
6. Quins avantatges i inconvenients té el motor de gasolina respecte d'altres motors com el dièsel?
Podemos considerar que, en general, los motores de gasolina tienen un mejor rendimiento gracias a que su combustión genera un mayor poder energético, determinado siempre por el octanaje del carburante empleado, sobre todo si tenemos en cuenta criterios como la velocidad o la capacidad de aceleración.
Aunque hay quienes ven un mejor rendimiento en motores diésel prestando atención a otros factores como la relación de compresión, ya que éstos permiten optimizar el llenado de aire en la cámara de combustión para que ésta sea más aprovechable por medio de relaciones de compresión más elevadas; alrededor de 18:1, lo que permite desarrollar un mismo trabajo con una menor cantidad de combustible.
Comparativamente, también podemos decir que los motores gasolina resultan más ligeros lo que les permite revolucionarse con mayor facilidad, así que en general podemos dictaminar que los motores gasolinas funcionan mejor en altas revoluciones.
7. Quina és la funció dels següents elements: bugia, biela, cigonyal i vàlvula?Se denomina bujia, al componente encargado de suministrar la chispa de encendido dentro de la camara de combustion, en un motor de combustion interna.
La
biela es el elemento del motor encargado de
transmitir la presión de los gases que actúa sobre el pistón al cigüeñal
8. Què és l'ordre d'encesa? Posa'n un exemple.
9. Què és un motor de cilindres en línia? Dibuixa les configuracions de motors més usuals.
10. Què és la gasolina i d'on s'obté? Quins perills té?
La gasolina es una mezcla de hidrocarburos alifotermos obtenida del petróleo por destilación fraccionada, que se utiliza como combustible en motores de combustión interna con encendido por chispa convencional o por compresión (DiesOtto), así como en estufas, lámparas, limpieza con solventes y otras aplicaciones. En Argentina, Paraguay y Uruguay, la gasolina se conoce como «nafta» (del árabe «naft»), y en Chile, como «bencina».
11. Quins són i quina funció fan els principals sistemes auxiliars del motor?
12. Quins vehicles, en general, fan servir gasolina sense plom 95 i quins gasolina sense plom 98?
Els utilitzen molts cotxes de avui dia, però n'hi han més de gasolina.


lunes, 18 de abril de 2016

lunes, 4 de abril de 2016
Corrents elèctriques
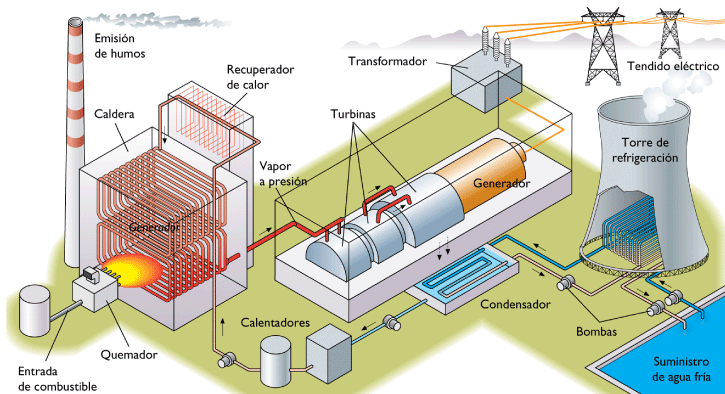
Central tèrmica de combustibles fòssils
Una central tèrmica de combustibles fòssils produeix energia elèctrica a partir de la combustió d'un combustible, com el carbó, el petroli o els seus derivats, el gas natural o la biomassa.
Central tèrmica nuclear
Una central tèrmica nuclear produeix energia elèctrica a partir de la reacció de fissió nuclear de substàncies radioactives com l'urani o el plutoni.

Central hidroelèctrica
Una central hidroelèctrica és una instal·lació on es produeix energia elèctrica a partir d'un corrent d'aigua en moviment.





Una central tèrmica de combustibles fòssils produeix energia elèctrica a partir de la combustió d'un combustible, com el carbó, el petroli o els seus derivats, el gas natural o la biomassa.
Central tèrmica nuclear
Una central tèrmica nuclear produeix energia elèctrica a partir de la reacció de fissió nuclear de substàncies radioactives com l'urani o el plutoni.
Central hidroelèctrica
Una central hidroelèctrica és una instal·lació on es produeix energia elèctrica a partir d'un corrent d'aigua en moviment.
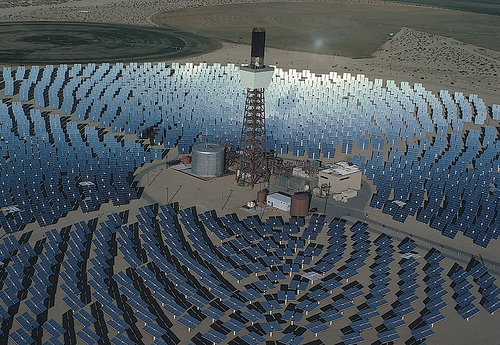
Central solar tèrmica
Una central solar tèrmica aprofita la llum del Sol per escalfar aigua i, així, generar vapor amb què produeix energia elèctrica.
Central solar fotovoltaica
Una central solar fotovoltaica utilitza cèl·lules fotovoltaiques per convertir l'energia solar en corrent elèctric de forma directa.
Central eòlica
Una central eòlica converteix l'energia de l'aire en moviment en energia elèctrica.
Central geotèrmica
Una central geotèrmica produeix energia elèctrica a partir de la calor procedent de l'interior de la Terra.
Central mareomotriu
Una central mareomotriu produeix energia elèctrica a partir del moviment de l'aigua del mar que té lloc durant la pujada i baixada de les marees.
viernes, 1 de abril de 2016
Producció, transport i distribució d'energia elèctrica
Producció d'energia elèctrica: centrals elèctriques
Una central elèctrica és una instal·lació en què es produeix energia elèctrica a partir d'una altra font d'energia.

Transport i distribució d'energia elèctrica
Les línies d'alta tensió porten el corrent elèctric des de les centrals elèctriques fins als habitatges i les indústries, on s'aprofita.

El transformador d'una central elèctrica eleva la tensió o voltatge del corrent generat.

Les subestacions transformadores redueixen la tensió del corrent elèctric.

Una central elèctrica és una instal·lació en què es produeix energia elèctrica a partir d'una altra font d'energia.
Transport i distribució d'energia elèctrica
Les línies d'alta tensió porten el corrent elèctric des de les centrals elèctriques fins als habitatges i les indústries, on s'aprofita.
El transformador d'una central elèctrica eleva la tensió o voltatge del corrent generat.
Les subestacions transformadores redueixen la tensió del corrent elèctric.
D'on obtenim l'energia?
Anomenem font d'energia aquell recurs que és present en la natura a partir del qual obtenim energia que usem per a diversos fins: escalfar-nos, il·luminar-nos, moure una màquina...
 Fonts d'energia no renovables
Fonts d'energia no renovables
· Carbó
· Petroli
· Gas natural
· Combustibles nuclears: urani i plutoni

Fonts d'energia renovables
· Energia hidràulica
· Energia eòlica
· Energia solar
· Biomassa (restes orgàniques)
· Energia mareomotriu
· Energia geotèrmica

· Carbó
· Petroli
· Gas natural
· Combustibles nuclears: urani i plutoni
Fonts d'energia renovables
· Energia hidràulica
· Energia eòlica
· Energia solar
· Biomassa (restes orgàniques)
· Energia mareomotriu
· Energia geotèrmica
Per a què usem l'energia
Utilitzem combustibles per escalfar-nos, obtenir aigua calenta, cuinar o moure vehicles amb motors de combustió.

Fabriquem piles i bateries amb què proveïm d'energia els nostres aparells elèctrics portàtils.

Aprofitem la llum del sol per fer càlculs amb una calculadora solar o per generar energia elèctrica a gran escala utilitzant panells fotovoltaics.

Ens beneficiem de la força del vent per moure un veler o generar energia en una central eòlica.

Connectem a la xarxa elèctrica els nostres electrodomèstics per fer tasques diverses.

Fabriquem piles i bateries amb què proveïm d'energia els nostres aparells elèctrics portàtils.
Aprofitem la llum del sol per fer càlculs amb una calculadora solar o per generar energia elèctrica a gran escala utilitzant panells fotovoltaics.
Ens beneficiem de la força del vent per moure un veler o generar energia en una central eòlica.
Connectem a la xarxa elèctrica els nostres electrodomèstics per fer tasques diverses.
Suscribirse a:
Comentarios (Atom)